- Каталог оборудования Siemens
- Каталог продуктов Siemens Industry
- Приводная техника
- Техника автоматизации
- Системы автоматизации
- Системы визуализации SIMATIC HMI
- Системы идентификации
- Промышленные коммуникации SIMATIC NET
- Введение
- Industrial Ethernet
- PROFINET
- Введение
- Привода
- Контроллеры
- Система управления процессами SIMATIC PCS 7
- Распределенная периферия
- Система управления перемещениями SIMOTION
- Системы ЧПУ SINUMERIK
- Устройства отображения и контроля
- Обзор систем отображения и контроля
- Активные сетевые компоненты
- Промышленные ПК
- Коммутационные и защитные приборы для распределения энергии
- Обзор системы
- Измерительные приборы SENTRON
- Конфигурирование, визуализация и управление с SIMATIC
- Конфигурирование, визуализация и управление с SENTRON
- Производственные датчики
- Пассивные сетевые компоненты
- Аппаратура управления
- Блоки питания SITOP
- Датчики
- Инжиниринговые пакеты
- Engineering / Network management / Diagnostics
- Технологические компоненты PROFINET
- Системный интерфейс к SIMATIC HMI
- PROFIBUS
- AS-Interface
- AS-интерфейс
- IO-Link
- IO-Link
- Промышленная беспроводная связь
- SINAUT ST7
- Информационная безопасность в промышленности
- Сетевые переходы
- ((unused ex ECOFAST))
- Промышленные аппараты управления SIRIUS
- Промышленные информационные технологии
- Управление на базе РС
- Системы управления процессом
- Контрольно-измерительные приборы
- Анализаторы процесса
- Блоки питания SITOP
- Продукты для специальных требований
- Energy
- Автоматизация и безопасность зданий
- Низковольтная коммутационная техника
- Технология безопасности
- Системные решения и продукты для отраслей
- Сервис

Системы SIMOTION
- Информационные материалы
Информационные материалы
Система SIMOTION
Систеный подход
SIMOTION может использоваться во всех станках, где требуется контролировать перемещения - начиная с маленьких и заканчивая сложными высокопроизводительными станками. Упор делается на простые и гибкие решения во всех задачах, где необходимо реализовать функции управления перемещениями. Для достижения этой цели был разработан новый подход к построению таких систем:
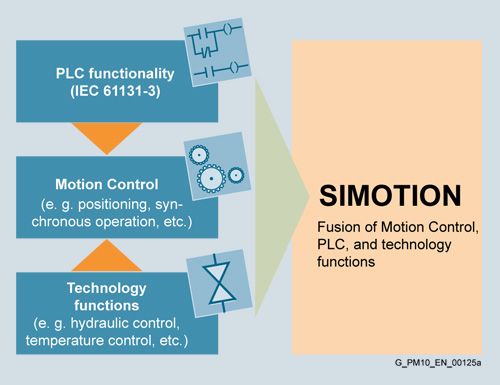
Функции управления перемещениями комбинированы с другими двумя функциями, которые наиболее часто встречаются в большинстве станков, а именно, функции программирования логики и технологические функции.
Такой подход позволяет управлять логикой работы всего станка и каждой осью в отдельности с помощью одной системы. Тоже самое можно сказать и про технологические функции, такие как управление давлением в гидравлических осях. Таким образом может производиться плавное переключение между управлением положением и давлением.
Комбинирование в обдной системе функции управления перемещениями,логические и технологические функции имеет следующие преимущества:
- Уменьшаются расходы на разработку станка и увеличивается его производительность
- Нет необходимости в интерфейсах между отдельными компонентами системы
- Простое, унифицированное и прозрачное программирование и диагностика всего станка
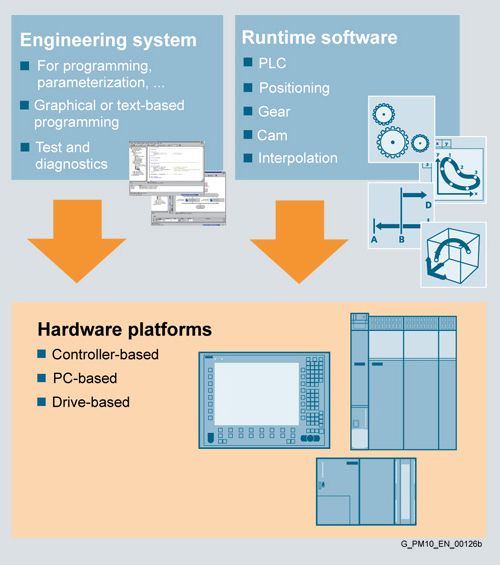
Система SIMOTION состоит из трех компонентов:
Среда разработки
Управление перемещениями, логические и технологические задачи программируются все внутри одной интегрированной среды разработки. Эта среда разработки предоставляет все необходимые средства для реализации этих задач: Начиная от программирования и параметрирования и заканчивая тестированием, запуском в эксплуатацию и диагностикой
Программные Runtime модули
Эти модули предоставляют разнообразные технологические функции и функции управления движением. Функционирование всей системы может быть подстроено под конкретный станок с помощью выбора соответствующих модулей.
Аппаратные платформы
Аппаратные платформы являются основой системы SIMOTION Motion Control. Приложение разработанное с помощью среды разработки и необходимые программные runtime модули могут использоваться на различных платформах.
Это означает, что пользователь может всегда выбрать платформу, которая наиболее точно подходит к конкретному станку, это может быть либо контроллер, либо промышленный ПК, либо интеллектуальный модуль, объединенный с приводом.Компоненты системы