
- Каталог оборудования Siemens
- Каталог продуктов Siemens Industry
- Приводная техника
- Преобразователи
- Стандартные преобразователи
- Общая информация о базовых преобразователях SINAMICS V
- Преобразователи частоты общего назначения SINAMICS G
- Высокопроизводительные преобразователи SINAMICS S
- Сервопреобразователь SINAMICS S110
- SINAMICS S120
- Excellence in Motion Control
- Системный обзор
- System data
- Модули контроля
- Сетевые модули и сетевые компоненты питания
- Модули двигателей
- Силовые модули
- Дополнительные системные компоненты
- Компоненты
- Кабели и штекеры MOTION-CONNECT
- Инструментальное программное обеспечение
- Safety Integrated
- Конфигурирование
- Сервис и документация
- Услуги и документация
- Приводная система SINAMICS S120
- Сертификация
- SIPLUS SINAMICS S120
- SINAMICS S120M distributed servo drive
- SINAMICS S120 Combi
- SINAMICS S120 Chassis Format Units
- SINAMICS S120 Cabinet Modules
- SINAMICS S150 converter cabinet units
- MICROMASTER
- SIPLUS POSMO A
- SIMODRIVE POSMO
- LOHER DYNAVERT Drive System
- Преобразователи на среднее напряжение
- Преобразователи постоянного тока
- Стандартные преобразователи
- Двигатели переменного тока
- Generators
- Мотор-редукторы
- Flender Gear Units
- Couplings
- Инструментальное программное обеспечение
- Дополнительные компоненты
- Преобразователи
- Техника автоматизации
- Energy
- Автоматизация и безопасность зданий
- Низковольтная коммутационная техника
- Технология безопасности
- Системные решения и продукты для отраслей
- Сервис
- Приводная техника

Basic positioner EPos
- Информационные материалы
Информационные материалы
Function module basic positioner (EPos)
The basic positioner EPos is available as a standard technology function on all SINAMICS S120 Control Units and can be called as a function module that can be activated additionally. The basic positioner can be used to resolve basic motion control tasks without additional external technological outlay from the drive itself.
Integrated functionality for absolute and relative positioning of linear and rotary axes with motor encoders or machine encoders.
The basic positioner Epos in the SINAMICS S120 drive system provides powerful and precise positioning functions. Due to its flexibility and adaptability, the basic positioner can be used for a wide range of positioning tasks.
The functions are easy to handle both during commissioning and during operation, and the comprehensive monitoring functions are outstanding.
Many applications can be carried out without external position controllers.
The EPos basic positioner is used to position linear and rotary axes (modulo) in absolute/relative terms with rotary as well as linear motor encoder or machine encoder (indirect or direct measuring system).
EPos is a function module that can be activated additionally in Servo Control and in Vector Control.
User-friendly configuring and commissioning including control panel (operation using PC) and diagnostics with the STARTER commissioning tool.
In addition to extremely flexible positioning functions, EPos offers a high degree of user-friendliness and reliability thanks to integral monitoring and compensation functions.
Different operating modes and their functionality increase flexibility and plant productivity, for example, by means of "on-the-fly" and bumpless correction of the motion control.
Preconfigured PROFIdrive positioning frames are available which, when selected, automatically establish the internal "connection" to the basic positioner.
Functionality of the EPos basic positioner
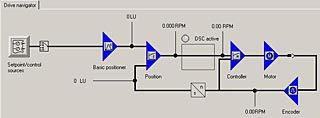
Lower-level closed-loop position control with the following essential components
- Position actual value sensing (including the lower-level measuring probe evaluation and reference mark search)
- Position controller (including limits, adaptation and pre-control calculation)
- Monitoring functions (standstill, positioning and dynamic following error monitoring, cam signals)
Mechanical system
- Backlash compensation
- Modulo offset
Limitations
- Speed/acceleration/delay/jerk limitation
- Software limit switches (traversing range limitation by means of position setpoint evaluation)
- Stop cams (traversing range limitation using hardware limit switch evaluation)
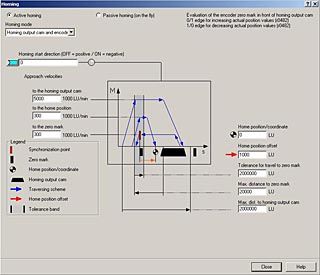
Referencing or adjustment
- Set reference point (for an axis at standstill)
- Search for reference (separate mode including reversing cam functionality, automatic reversal of direction, homing to "output cam and encoder zero mark" or only "encoder zero mark" or "external zero mark (BERO)")
- Flying referencing (seamless referencing possible during "normal" traversing with the aid of the measuring input evaluation; generally evaluation, e.g. of a BERO. Subordinate function for the modes "jog", "direct setpoint input/MDI" and "traversing blocks")
- Absolute encoder alignment
Traversing blocks mode (64 traversing blocks)
- Positioning using traversing blocks that can be stored in the drive unit including block change enable conditions and specific tasks for an axis that was previously referenced
- Configuring traversing blocks using the traversing block editor in the commissioning tool of the SINAMICS drive family
- A traversing block contains the following information:
- Job number and job (e.g. positioning, waiting, GOTO block jump, setting of binary outputs, travel to fixed endstop)
- Motion parameters (target position, velocity, override for acceleration and deceleration)
- Mode (e.g.: hide block, continuation conditions such as "Continue_with_stop", "Continue_flying" and "Continue_externally using high-speed probe inputs")
- Job parameters (e.g. wait time, block step conditions)
Direct setpoint input (MDI) mode
- Positioning (absolute, relative) and setting-up (endless closed-loop position control) using direct setpoint inputs (e.g. via the PLC using process data)
- It is always possible to influence the motion parameters during traversing (on-the-fly setpoint acceptance) as well as for on-the-fly changes between the setup and positioning modes.
- The direct setpoint specification operating mode (MDI) can also be used in the relative positioning or setup mode if the axis is not referenced. This means that on-the-fly synchronization and re-referencing can be carried out using "flying referencing".
Jog mode
- Closed-loop position controlled traversing of the axis with "endless position controlled" or "jog incremental" modes (traverse through a "step width"), which can be toggled between